Positioneren met elektrisch aangedreven spindels
Modulaire systeem oplossing
Bij het bewegen van platformen (of bodems) met behulp van schroefspindels, is een goede gelijkloop een eerste vereiste voor een goed functioneren. Bij de traditionele en beproefde manier van aandrijven (met centrale motor en mechanische koppeling van de verschillende schroefspindels) is het belangrijk dat begin en eind positie van het platform in het zelfde vlak liggen, en het platform een zekere eigen stijfheid heeft.
Als gevolg van torsie in de constructie (bijvoorbeeld bij scheepsrompen of zeer ongelijke platformbelastingen) kunnen problemen ontstaan met de hefbeweging. Daarnaast kunnen grote afstanden, inbouwbeperkingen of complexere hefbewegingen een reden zijn om af te zien van een mechanische koppeling van de spindels.
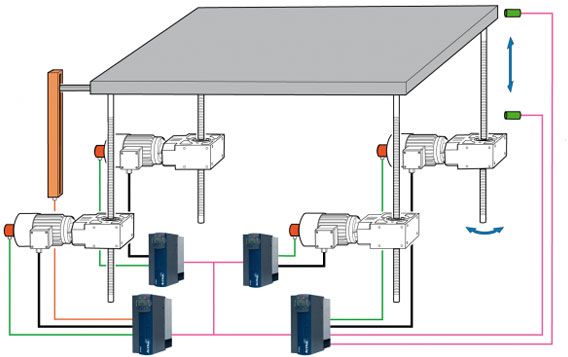
Bij elektronisch gekoppelde schroefspindels hebben alle spindels hun eigen motor en hun eigen regelaar, waarbij de regelaars onderling zijn verbonden via een ehternetbased - of veldbusprotocol. Op basis van encoder- en naderingsschakelaar informatie, zullen de regelaars de spindels precies zo bewegen dat het platform vlak en gelijkmatig wordt bewogen.
Ook het goed aanliggen in sponningen, voor bijvoorbeeld een waterdichte afsluiting, kan eenvoudig worden gerealiseerd door het onafhankelijk van elkaar aandraaien van de spindels tot een bepaalde koppelwaarde, ook als uitgangs- en eind positie niet exact in het zelfde vlak liggen.
Elektronisch gekoppelde hefspindels
Eigenschappen en prestaties:
- Elektronische gelijkloop in snelheid en/of positie met directe synchronisatie
- Feedback met multiturn absoluut encoder, protocol SSI, Hiperface of Endat2.1
- Master met maximaal 16 slaves.
- Synchronisatie realtime (distributed clocks) d.m.v. CanBus , EtherCat™, profinet of ethernetIP
- Slave assen te corrigeren naar master en vice versa.
- Absolute, relativ, of touchprobe positionering.
- On board PLC (FB programming).
- Geschikt voor asynchroon draaistroommotoren en PM-synchroonmotoren.
- Binnen de Vplus software menugroep Positioning
- Status en diagnose.
- Contour bewaking.
- Intern afhandelen van Hardware limitswitches.
- Software limitswitches.