Servo aandrijvingen
Servo aandrijvingen, achtergrond en zinvolle toepassing.
Servotechniek rukt in de industrie steeds verder op. Deels omdat sommige toepassingen dit eisen, maar soms ook omdat “de klant” het gewoonweg wil. Uiteraard is op servotechniek dezelfde kosten en baten logica van toepassing als op enige andere manier van aandrijven, maar om de een of andere reden blijft servotechniek omgeven door een zekere mystiek.
De intrinsieke eigenschappen van een servomotor zijn op zich al interessant (Hoge koppel/vermogensdichtheid, vlak koppelverloop en een zeer lage massatraagheid), en in combinatie met de juiste besturing (hoge rekenkracht, hoge rekensnelheid) kan een servomotor zeer snel en extreem precies worden gepositioneerd. Als motor en besturing goed op elkaar zijn afgestemd, is er sprake van een “motion control” toepassing. Motion control is duidelijk meer dan aandrijven alleen, het gaat over dynamiek en controle.
Met name in het grensgebied tussen “motion control” en “slim aandrijven” is nog een wereld aan mogelijkheden en oplossingen. Door “gewone” slimme regelaars te combineren met servomotoren of “gewone” motoren met een terugkoppelvoorziening zijn al veel typische motion control taken probleemloos en voordelig te realiseren.
Voor toepassingen waar een zeer hoge positionering, herhalingsnauwkeurigheid of dynamiek verlangd wordt is een servomotor nog steeds niet te verslaan.
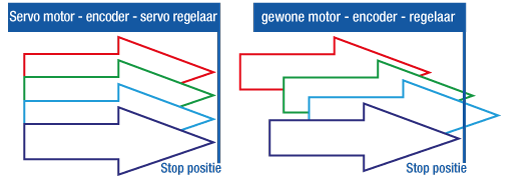
Door het afwijkende motorstuurprincipe is een servomotor in staat om nauwkeurig en snel de gevraagde hoekverdraaiing te leveren. Bij een draaistroommotor zal door de optredende slip in het draaiveld deze reactie veel trager en onnauwkeuriger verlopen, zelfs als er een encoder is gemonteerd. Dit is gevolg van het onvermogen van een draaistroommotor om rond de 0 Hz de LSB (Least Significant Bit) incrementen nauwkeurig te volgen.
LSB is de maat van de kleinst bereikbare besturingsstap die met Digitaal/Analoog en Analoog/Digitaal converters haalbaar is. Een increment is de kleinste bereikbare rotatiestap van een elektromotor.
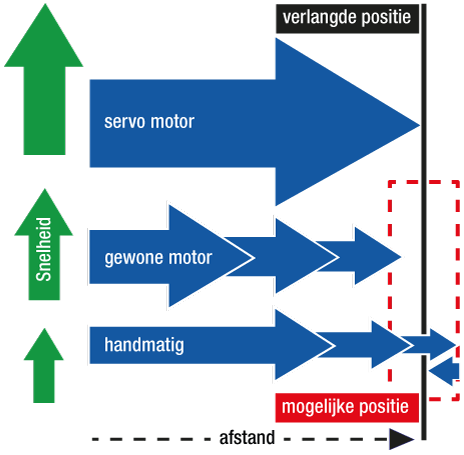
Servomotoren kunnen door hun constructie, zelfs vanuit stilstand, vrijwel per increment worden bestuurd. De eerste vraag die bij het selecteren van een aandrijving moet worden gesteld hoeveel “nauwkeurigheid” er echt nodig is. Deze vraag beslaat het geheel van de aandrijving, motor, reductor en besturing.
Naast nauwkeurigheid is er nog een andere belangrijke parameter die een rol speelt bij de keus voor een servomotor of een conventionele motor, …..de dynamiek. Ook wat betreft dynamiek (vermogen om zeer snel een beweging te starten of te veranderen van richting) is een servomotor bijna niet te verslaan.
In onderstaande tabel zijn de relatieve voor- en nadelen van 3-fasen en servomotoren naast elkaar gezet, maar de werkelijkheid is iets genuanceerder.
Draaistroom en Servo motoren vergeleken
| AC 3 fasen motor | AC Servomotor | |
|---|---|---|
| Massatraagheid | + | ++ |
| Complexiteit van de regelaar | 0 | - |
| Complexiteit van de motor | 0 | + |
| Koppelverloop | + | ++ |
| Regelgedrag | 0 | ++ |
| Maximaal toerental | + | ++ |
| Maximaal vermogen | ++ | + |
Ook hier geldt dat de gehele aandrijflijn hierop moet zijn afgestemd, en ook het aan te drijven proces moet hiervoor geschikt zijn. Zo kan het bewegen van een brug wellicht heel nauwkeurig moeten gebeuren, maar heel dynamisch zal het niet worden. Net als bij “gewone” motoren onderscheiden we ook bij servomotoren DC en AC synchrone motoren.
Elsto levert primair AC synchrone servomotoren, waarbij permanent magneten in de rotor verwerkt zijn en de aansturing via een sinusvormige spanning verloopt. De resolvers zijn een integraal onderdeel van de motoren en voorzien van een aparte aansluiting op de motorbehuizing. Borstelloze AC servomotoren zijn onderhoudsarm, leveren een hoog koppel, zijn compact en relatief gunstig geprijsd.
Regelaars
Zoals in het persbericht over de nieuwe ANG frequentieregelaars in detail beschreven, heeft Bonfiglioli sinds kort met haar ANG Active Cube regelaar een nieuwe krachtige regelaar met servo potentie. Met deze regelaar kan het onderste uit de kan worden gehaald van zowel servomotoren als conventionele motoren, en is daarmee de perfecte regelaar voor mid-range en semi-high end servo toepassingen, maar ook het high-end segment kan deels worden bediend.

Indien een ANG regelaar wordt toegepast in combinatie met een standaard ELSTO motor voorzien van encoder en een standaard reductor, is voor veel toepassingen al een prima werkende mid-range aandrijfoplossing te realiseren. Wordt echter de regelaar gekoppeld aan één van de Bonfiglioli servomotoren uit de BMD of BTD/BCR serie samen met een reductor uit de hoog precieze TQ(K) of PL-serie is er sprake van een duidelijke high-end oplossing.
Voor relatief eenvoudige zaken als het hoeksynchroon laten lopen van assen of spindels kan met een eenvoudigere regelaar, motoren en reductoren worden volstaan. Het spreekt vanzelf dat hierbij behoorlijke kosten voordelen kunnen worden geboekt ten opzichte van “echte” servosystemen, terwijl voor de toepassing een perfect werkende oplossing kan worden gerealiseerd.
Reductoren
In vrijwel alle praktische toepassingen zal de motor niet direct de last bewegen. Om de gewenste beweging met de juiste kracht en snelheid te kunnen uitvoeren zal de motor doorgaans zijn gekoppeld zijn aan een reductor of actuator. De keuze van de juiste reductor of actuator is van groot belang, want ook hier dient de nauwkeurigheid en dynamiek te passen bij het gebruiksdoel, maar ook afmetingen en de juiste montage interface zijn van belang. Om die reden is een diep en breed programma reductoren van groot belang om precies de juiste aandrijving voor de toepassing te kunnen aanbieden.
Vakmanschap
Door jarenlange ervaring en goede invoering in de markt, zijn de ELSTO verkoopmedewerkers maar ook de ELSTO engineers meer dan gemiddeld in staat om een uitgebalanceerde combinatie voor te stellen van standaarddelen, specifieke servo technologie en maatwerk.
Op die manier kan op de meest gunstige wijze een perfect werkende oplossing worden geboden voor een concrete aandrijf of motion-control vraag.
De ELSTO verkoopafdeling helpt u graag verder.